Challenge
The client needed remote robot observability and control with near-instant feedback to reduce on-site intervention and downtime risk.
Solution
Implemented a high-fidelity digital twin that mirrored live robot state and supported direct control and diagnostics from remote interfaces.
Outcome
Maintenance and troubleshooting became faster and safer, while simulation and operator training could happen without risking physical assets.
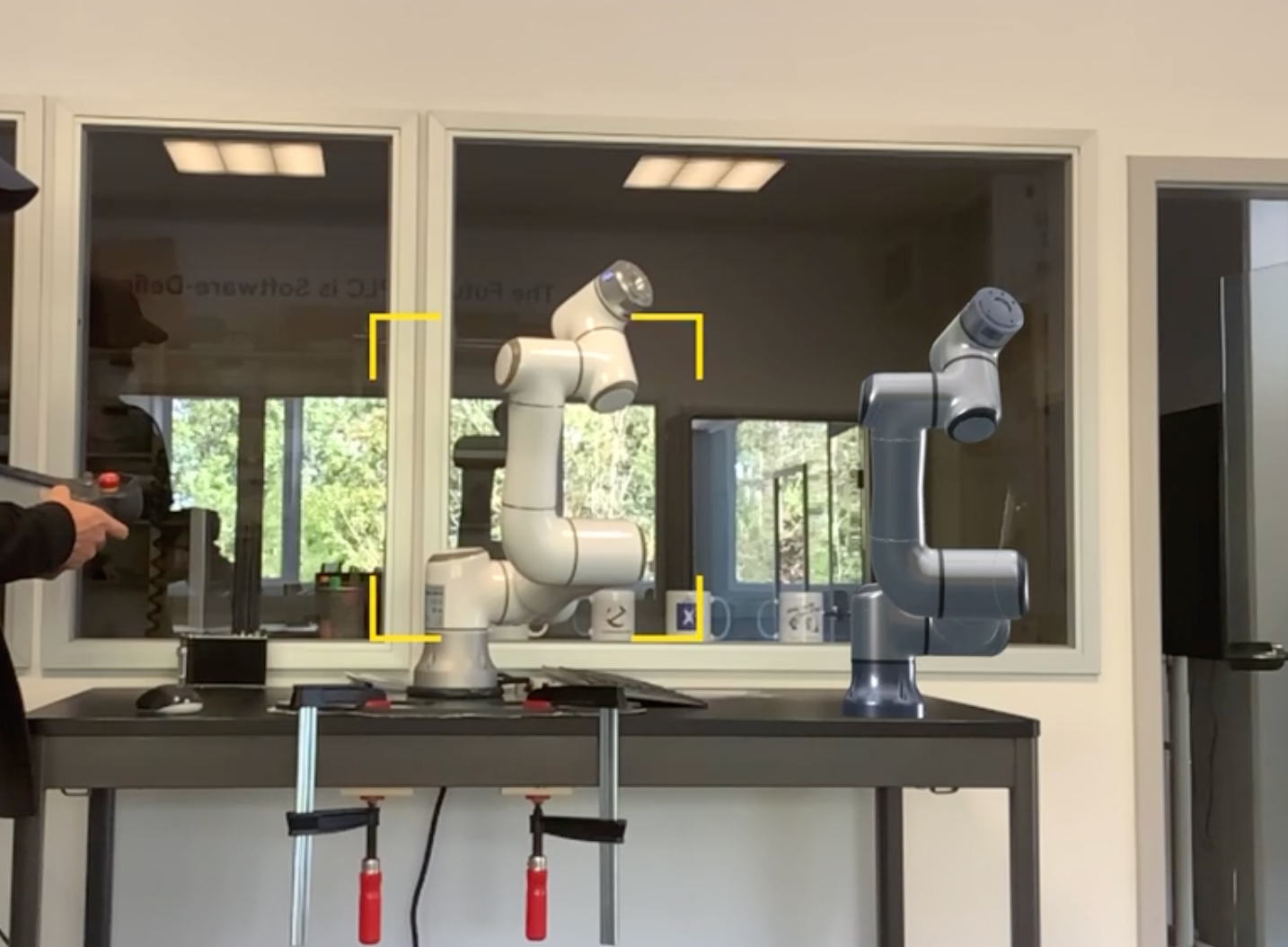
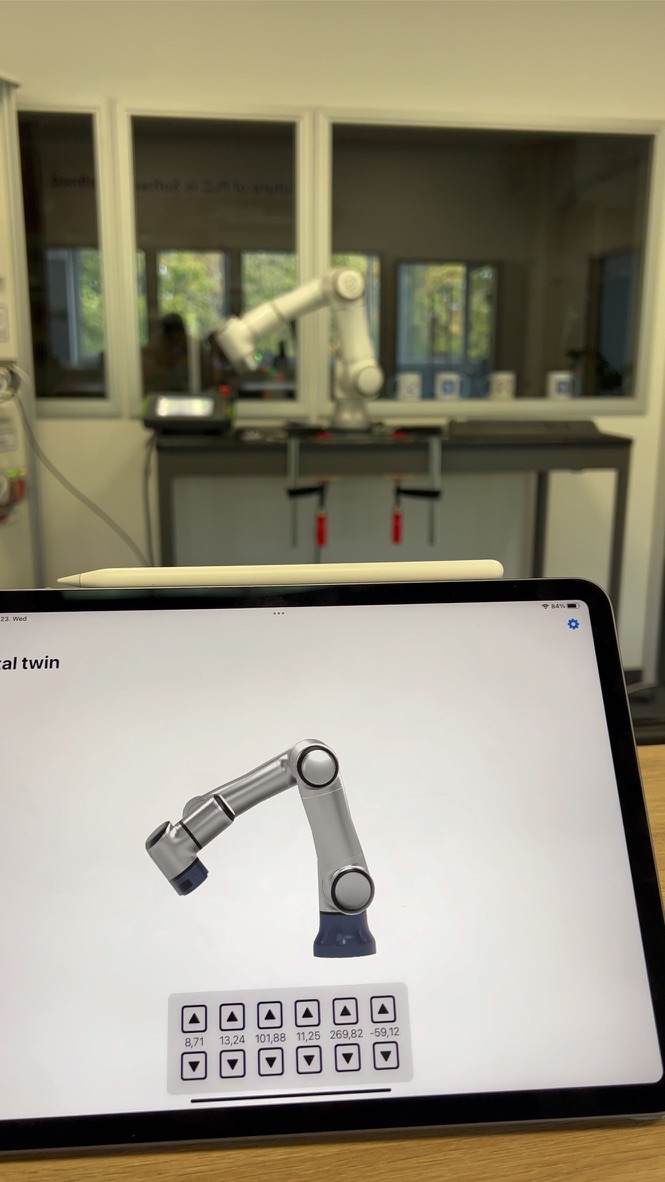
This project focused on preserving trust in remote control by ensuring the digital twin reflected real machine behavior with high fidelity.
Beyond visualization, the platform enabled practical operational workflows: diagnostics, state inspection, controlled interventions, and safer scenario testing.
Operational gains
- Lower mean time to diagnose robotic issues
- Less dependency on immediate on-site interventions
- Safer experimentation in training and simulation contexts